
Styrte robot fra rommet

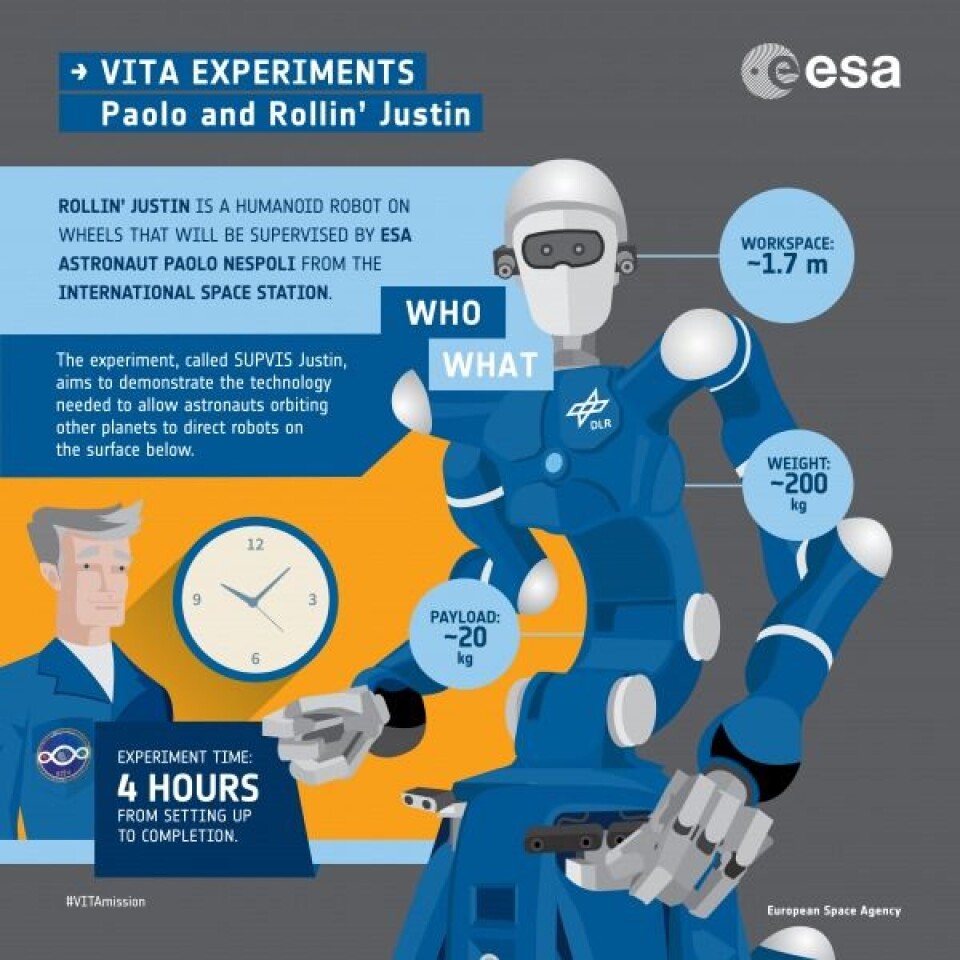
ESAs italienske romfarer, Paolo Nespoli, som skal være på den internasjonale romstasjonen i nesten seks måneder, har styrt en robot som befinner seg på jorda. Slik fjernstyring av roboter kan bli viktig når romfarere skal lande på Mars.
I fremtiden kan det bli nødvendig for romfarere å bruke roboter til å utføre farlige eller vanskelige oppgaver, eller sette opp base på planeter eller måner, mens romfarerne selv er i bane rundt himmellegemet.
Men å la romfarere styre roboter er et nytt felt for romorganisasjonene og må testes grundig.
Derfor har ESA utført flere forsøk på romstasjonen for å teste datanettverket og kontrollsystemene som trengs for at astronauter i rommet skal kunne styre roboter på bakken.
Reparerte solcellepaneler ”på” Mars
I testen som ble gjort i begynnelsen av september 2017, befant roboten Rollin’ Justin seg i Oberpfaffenhofen i Tyskland. Justin er utviklet av den tyske romorganisasjonen DLR for bruk i rommet.
Romfareren, Paolo, er på sitt 6 måneder lange opphold på romstasjonen, som går i bane rundt jorda med en fart på 28 800 kilometer i timen, cirka 400 kilometer over hodene på oss.
Testen simulerte at Paolo var i bane rundt Mars, mens Justin var nede på overflaten for å undersøke solcellepaneler som hadde sviktet.
I den første oppgaven instruerte Paolo Justin til å rulle bort til hvert av solcellepanelene og plugge inn et instrument for å undersøke dem og laste ned feilloggene.
Under testens andre oppgave måtte Justin undersøke solcellepanelene ved å plugge inn instrumentet og finne ut hvilket panel som trengte å oppdatere programvaren sin. Når det var funnet oppdaterte Justin solcellepanelet.
I den tredje og siste oppgaven hadde ett av solcellepanelene sviktet etter en sandstorm. Paolo brukte Justin til å finne det ødelagte panelet og ta bilder for bakkekontrollen på jorda.
Kontrolleres med pek og klikk på nettbrett
Ved hjelp av kunstig intelligens og maskinlæring kan Justin gjøre mye på egenhånd, slik roboter i rommet må kunne.
Paolo styrte Justin ved hjelp av et nettbrett og trengte bare å klikke på skjermen for å få roboten til å utføre de rette oppgavene.
Ved hjelp av et kamera på Justin kunne Paolo se på nettbrettet det som Justin så.

På skjermen var det også et minikart som oppdaterte seg selv etter som Justin utførte oppgavene sine.
For eksempel kom det å bevege kameraet til Justin for å se nærmere på et av solcellepanelene opp på minikartet som et nytt punkt Paolo kunne navigere til.
Dermed styres Justin som et klikk-og-pek dataspill, men mye mer komplisert og med null rom for feil.
Brukervennlig og lett å lære
- For øyeblikket tester vi kun med én robot, men i fremtiden kommer vi til å bruke mange roboter som vil jobbe sammen, sa Thomas Kruger ved Telerobotics and Haptics Lab hos ESA.
Ifølge ham vil fremtidens romfarere styre grupper av roboter ved å fortelle dem hva de skal gjøre, som robotene så vil utføre på egenhånd.
Paolo var svært fornøyd med testen. Mens han jobbet med Justin kom to av de amerikanske romfarerkollegene hans, Randy Bresnick og Jack Fischer, for å se på.
Etter en kort innføring fikk også Randy og Jack prøve seg på den første oppgaven i robottesten, som de klarte uten problemer.
Det er planlagt to tester til med Justin og flere andre romfarere. Den neste testen kan skje allerede i januar 2018, etter at robotforskerne har forbedret Justins programvare litt til.
Paolos romferd har fått navnet VITA. Du kan se illustrasjoner om hva han skal gjøre i rommet her.
Også ESAs danske romfarer, Andres Mogensen, testet en robot da han var på romstasjonen i 2015.